 العربية
العربية
 English
English español
español




1. أقصى ارتفاع في الالتقاط: المسافة الأبعد التي ينحدرها الروبوت رأسياً أثناء عملية التقاط من موضع الأصل المركزي.
2. الحمل المقنن: الحد الأقصى للحمل الذي يمكن أن يتعامله الروبوت تحت الأداء الأمثل والتشغيل العادي.
3. حمولة أقصى: الحمل الذي يتجاوز الحد المقنن الذي يمكن أن يؤثر على أداء الروبوت ، مما يسبب زيادة في التآكل على المحرك ، والذراع المدفوع ، والعمود الوسيط ، والأجزاء.
المنطقة الأصلية :
Chinaفترة إنتاج :
15 days after receiving depositميناء الشحن :
Guangzhouدفع :
TTالحد الأدنى للترتيب :
1


عناصر
المعلمة

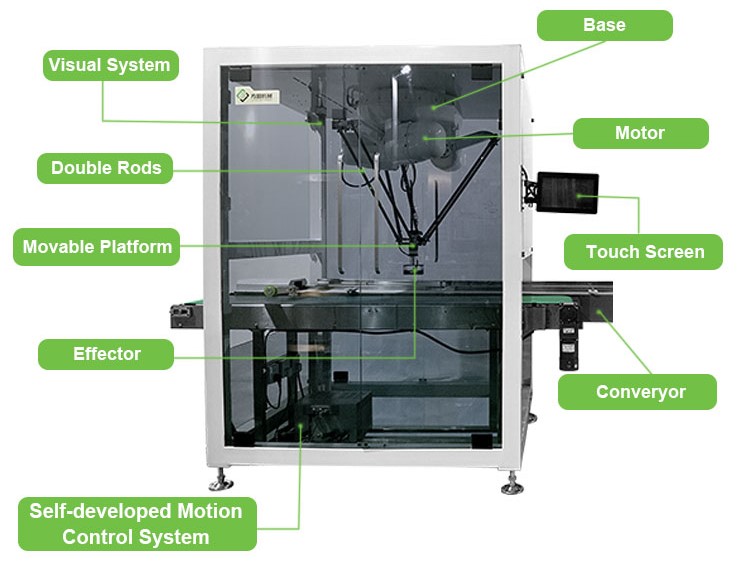
مواصفة--دلتا روبot ARM لفرز البضائع
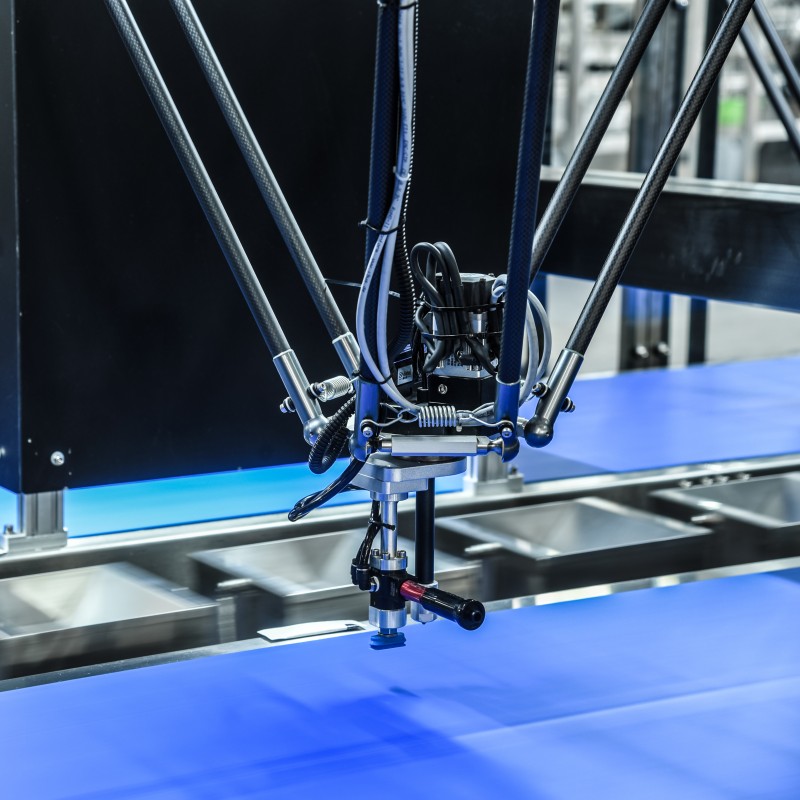
1. مادة الجسم مصنوعة بشكل رئيسي ألياف الكربون و تكوين سبيكة الألومنيوم;
2. يمكنه تحديد الكائن المستهدف بدقة من خلال مستشعر أو نظام بصري، تتبع الحركة واختيار ووضع الكائن الهدف إلى الموضع المحدد ;
3. عالية السرعة وحدة معالجة مع وظيفة روبوت forfree في ثلاثة أبعاد يوفر الدقة في الحركة وتحديد المواقع وكذلك أ استجابة ديناميكية عالية بسرعة مستقرة 80 اختيار في الدقيقة;
4- التصميم الميكانيكي الصلب للغاية والكتلة المنخفضة المتحركة تجعل التوازي نظام دلتا الحركي مع محاور الحزام المسنن حتى ثلاث مرات بالسرعة أنظمة الديكارتية المماثلة ;
5. ثلاثة قضبان مزدوجة الحفاظ على الوحدة الأمامية أفقيا في جميع الأوقات. المحاور والمحركات المؤازرة لا تتحرك مع الوحدة ;
6. نظام الحركية الموازي مناسب للتعامل مع الأحمال ما يصل إلى كحد أقصى 5 كجم;
7. حزم كيس تم اختيارها ووضعها بواسطة نظام وحدات الروبوت المتوازية عالية السرعة. التعرف البصري المتعمق لفرز الأمامي والخلف و اتجاه الأكياس. النظام المبرمج ينفصل عن الأرقام من خلال الأرقام الصحيحة. متصل بآلة الكرتون لإكمال عبوة الأتمتة.


طلب


1.الحد الأقصى لارتفاع الالتقاط: أقصى مسافة تنازلية من مركز موضع الأصل الرأسي إلى أسفل أثناء عملية الالتقاط2- الحمل المقدر: الحمولة القصوى للروبوت في ظل أفضل أداء وتشغيل عادي للروبوت3. الحد الأقصى للحمل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورة أجل الحد الأدنى: 1الدفع: T / Tميناء الشحن: قوانغتشوالمنطقة الأصلية: الصينالمهلة الزمنية: 20-30days
اقرأ أكثر
الحد الأقصى لارتفاع البيك اب: أقصى مسافة تنازلية من مركز الموضع الأصلي رأسيًا إلى أسفل أثناء عملية الاستلام.معدل الحمولة: أقصى حمل للروبوت في ظل أفضل أداء وتشغيل عادي للروبوتماكس تحميل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورةأجل الحد الأدنى: 1الدفع: TTميناء الشحن: قوانغتشوالمنطقة الأصلية: قوانغتشو الصينالمهلة الزمنية: 22 يوما بعد تلقي الودائع
اقرأ أكثر
1.maximum ارتفاع الالتقاط: أقصى مسافة تنازلي من مركز موضع الأصل العموديإلى أسفل أثناء عملية التقاط。2. الحمل المصنوع: الحد الأقصى الحمل للروبوت تحت أفضل أداء وتشغيل عادي للروبوت3. تحميل الحمل: الحد الأقصى للحمل للروبوت الذي يتجاوز الحمل المقنن. إذا تجاوز الحمل المقنن ،سيتأثر مؤشر أداء الروبوت ، ومشكلة التآكل للمحرك ، وارتداء الأجزاء ، والذراع المدفوعة ،سيكون العمود المتوسط أكثر جدية MIN الترتيب: 1الدفع: T/T.الشحن: قوانغتشوالمنطقة الأصلية: الصينالمهلة: 15 يومًا بعد استلام الودائع
اقرأ أكثر
أداة دلتا روبوت Producer الأوتوماتيكية ذات 4 محاور وذراع الدلتا الآلي للأكياس قابلة للتطبيق في انتقاء أو وضع الكيس والبسكويت والحلوى وعلب الصفيح والزجاجة والملحقات وما إلى ذلك.توفر وحدة المعالجة عالية السرعة المزودة بوظيفة الروبوت لحركة حرة بأبعاد ثلاثية الدقة في الحركة وتحديد الموضع.الحد الأدنى للطلب:1قسط:تي / تميناء الشحن:قوانغتشوالمنطقة الأصلية:الصينمهلة:60 يوما
اقرأ أكثر
إن روبوت دلتا عالي السرعة ذو 4 محاور لانتقاء وتحميل الأكياس في الصندوق قابل للتطبيق في انتقاء أو وضع البسكويت والحلوى وعلب الصفيح والزجاجة والأكياس والملحقات وما إلى ذلك في الصناديق. إنه ذكي وسريع وفعال.الحد الأدنى للطلب:1قسط:تي / تميناء الشحن:قوانغتشوالمنطقة الأصلية:الصينمهلة:60 يوما
اقرأ أكثر
4 محاور حمولة 3 كجم اختيار ووضع روبوت دلتا لتعبئة غطاء مناديل الطفل الحد الأقصى لارتفاع البيك اب: أقصى مسافة تنازلية من مركز الموضع الأصلي رأسيًا إلى أسفل أثناء عملية الاستلام.معدل الحمولة: أقصى حمل للروبوت في ظل أفضل أداء وتشغيل عادي للروبوتماكس تحميل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورةالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:22 يوما بعد تلقي الودائع
اقرأ أكثر
1.maximum ارتفاع الالتقاط: أقصى مسافة تنازلي من مركز موضع الأصل العموديإلى أسفل أثناء عملية التقاط。2. الحمل المصنوع: الحد الأقصى الحمل للروبوت تحت أفضل أداء وتشغيل عادي للروبوت3. تحميل الحمل: الحد الأقصى للحمل للروبوت الذي يتجاوز الحمل المقنن. إذا تجاوز الحمل المقنن ،سيتأثر مؤشر أداء الروبوت ، ومشكلة التآكل للمحرك ، وارتداء الأجزاء ، والذراع المدفوعة ،سيكون العمود المتوسط أكثر جدية MIN الترتيب: 1الدفع: T/T.الشحن: قوانغتشوالمنطقة الأصلية: الصينالمهلة: 15 يومًا بعد استلام الودائع
اقرأ أكثر











 شبكة IPv6 مدعومة
شبكة IPv6 مدعومة
