 العربية
العربية
 English
English español
español



أعشاش Swiftlet انتقاء الريش بواسطة Payload 3kg Parallel 4axis Delta Robot Integration System
بناء ل أعشاش Swiftlet انتقاء الريش بواسطة Payload 3kg Parallel 4axis Delta Robot Integration System

وظيفة حدد والتقط الريش من عش الطائر رأس التنظيف 1 سرعة التنظيف 10-20 دقيقة لكل عش طائر Clمحطة الولاء 5 محطات الجهد االكهربى 220 فولت ، 50/60 هرتز قوة 2 كيلو واط وزن 400 كجم مقاس 2100 (L) * 1100 (W) * 1900 (H) ملم

تخصيص
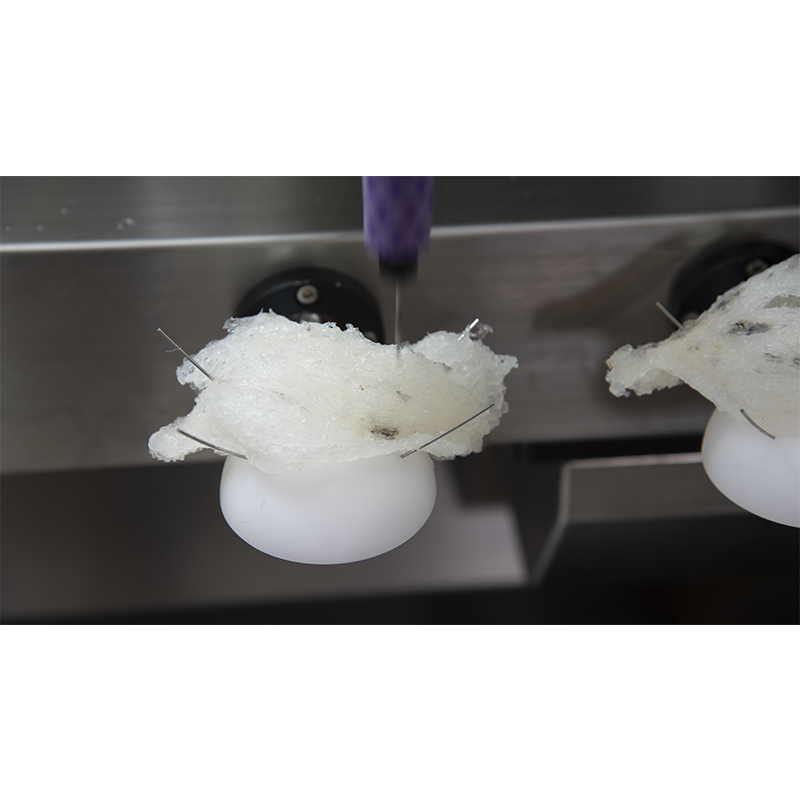
1.يمكنه التقاط الريش السريع حجم أكثر من 0.5 مم و ال معدل الانتقاء أكثر من 80٪.
2. المعدات مقسمة إلى مجالين: منطقة قطف شعر عش الطائر و ال منطقة التحميل والتفريغ. يتم فصل المنطقتين إلى تجنب التلوث منطقة التحميل والتفريغ بسبب الشوائب مثل ريش الطيور المتناثر في منطقة قطف عش الطائر.
3.1 تم تصميم أسطح العمل في كلا المجالين لتكون مقاومة للماء ، و يمكن غسل أسطح العمل مباشرة بالماء، وهو مناسب للتنظيف. تم تجهيز مخرج التصريف من سطح العمل بفتحة شاشة التصفية، والتي يمكن أعد تدوير عش الطائر المكسور.
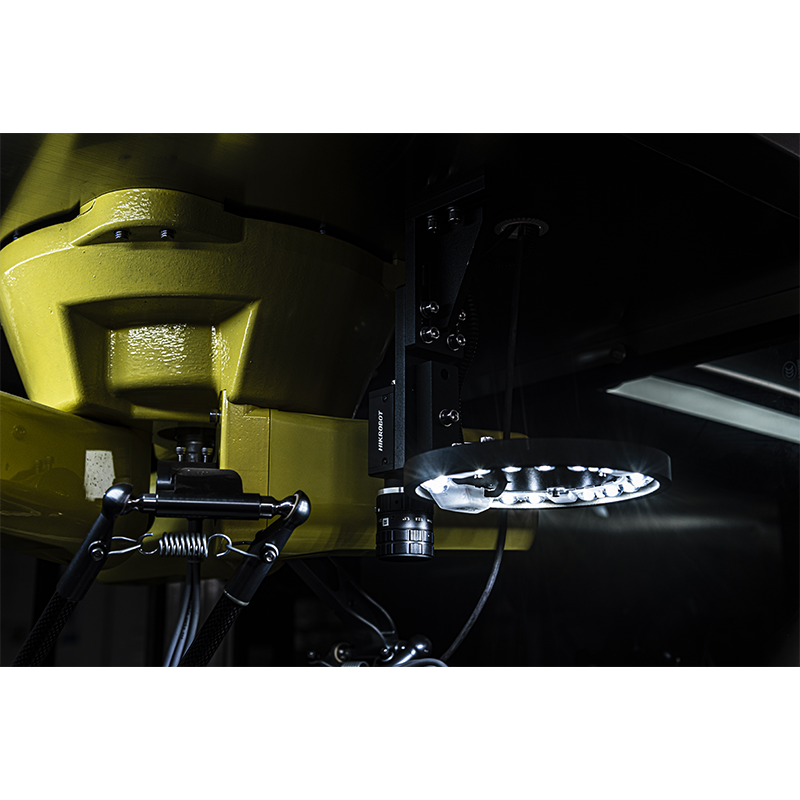
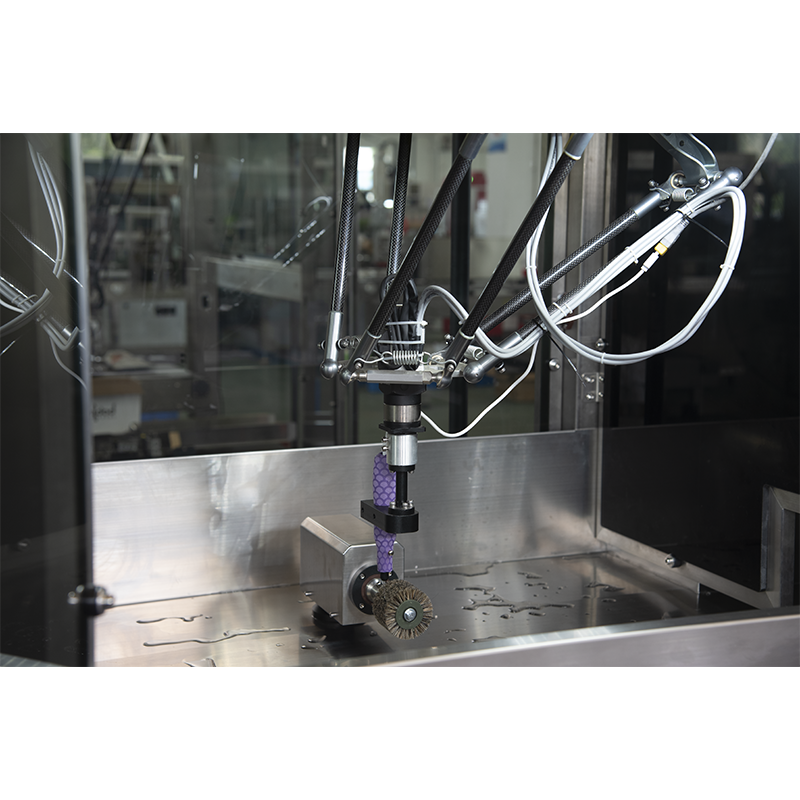
3.2 في منطقة اقتطاف الشعر ، يتم استخدام روبوت دلتا رباعي المحاور تتعاون مع المحور الخامس بمحطة مص الشعر، والتي يمكن أن تحدد بدقة شوائب الريش السريع فوق 0.5 مم ، وتنفيذ تحديد المواقع بدقة وإزالتها.
3.3 و 5 عش طائر يمكن تحميلها في
3.4 يتم التحكم في محطات الانتقاء الخمسة بواسطة متدرج المحركات والقضبان اللولبية، والتي يمكن أن تتحرك ذهابًا وإيابًا بين منطقة التحميل والتفريغ ومنطقة التقاط عش الطائر. تنتظر محطة الالتقاط أولاً التحميل اليدوي في منطقة التحميل والتفريغ. بعد اكتمال التحميل ، يتم نقلها إلى منطقة قطف عش الطائر. سوف الروبوت دلتا اختر الريش من 5 محطات على التوالي. بعد قطف كل الريش ، ستعود المحطات إلى منطقة التحميل والتفريغ ، وبعد ذلك ستعود المعدات إصدار إنذار لإخطار الموظفين استبدل الأعشاش.
تشييد ذراع روبوت دلتا لتنظيف عش الطيور الصالحة للأكل

تطبيقات ل 2 رئيس الزجاج زجاجة برغي كابر

اتصل بنا

ال انتق و ضع يمكن أن تساعد الذراع الآلية في تحديد شوائب الريش في عش الطائر والتقاطهارقم الصنف:UTالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:30 يوما بعد تلقي الودائع
اقرأ أكثر
ال انتق و ضع يمكن أن تساعد الذراع الآلية في تحديد شوائب الريش في عش الطائر والتقاطهارقم الصنف:UTالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:30 يوما بعد تلقي الودائع
اقرأ أكثر
ال انتق و ضع يمكن أن تساعد الذراع الآلية في تحديد شوائب الريش في عش الطائر والتقاطهارقم الصنف:UTالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:30 يوما بعد تلقي الودائع
اقرأ أكثر
ال انتق و ضع يمكن أن تساعد الذراع الآلية في تحديد شوائب الريش في عش الطائر والتقاطهارقم الصنف:UTالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:30 يوما بعد تلقي الودائع
اقرأ أكثر
ال انتق و ضع يمكن أن تساعد الذراع الآلية في تحديد شوائب الريش في عش الطائر والتقاطهارقم الصنف:UTالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:30 يوما بعد تلقي الودائع
اقرأ أكثر
منتج جديد آلة تنظيف عش الطائر الصالحة للأكل عبارة عن نظام انتقاء ذكي مدمج بواسطة روبوت دلتا رباعي المحاور ونظام رؤية عميق للتعلم ، مما يساعد على تحديد الريش على سطح عش الطائر ثم إزالته من العش باستخدام رئيس قطف الريش الطبي. يقوم نظام قطف روبوت دلتا بأتمتة عملية الانتقاء الأولى لعملية قطف عش الطائر.الحد الأدنى للطلب:1قسط:تي / تميناء الشحن:قوانغتشوالمنطقة الأصلية:الصينمهلة:30 يوما بعد تلقي الودائع
اقرأ أكثر
منتج جديد آلة قطف ريش عش الطيور من دلتا روبوت للأكل هي عبارة عن نظام انتقاء ذكي مدمج بواسطة روبوت دلتا رباعي المحاور ونظام رؤية التعلم العميق ، مما يساعد على تحديد الريش على سطح عش الطائر ثم إزالته من عش برأس قطف ريشة طبية. يقوم نظام قطف روبوت دلتا بأتمتة عملية الانتقاء الأولى لعملية قطف عش الطائر.الحد الأدنى للطلب:1قسط:تي / تميناء الشحن:قوانغتشوالمنطقة الأصلية:الصينمهلة:30 يوما بعد تلقي الودائع
اقرأ أكثر











 شبكة IPv6 مدعومة
شبكة IPv6 مدعومة
