 العربية
العربية
 English
English español
español




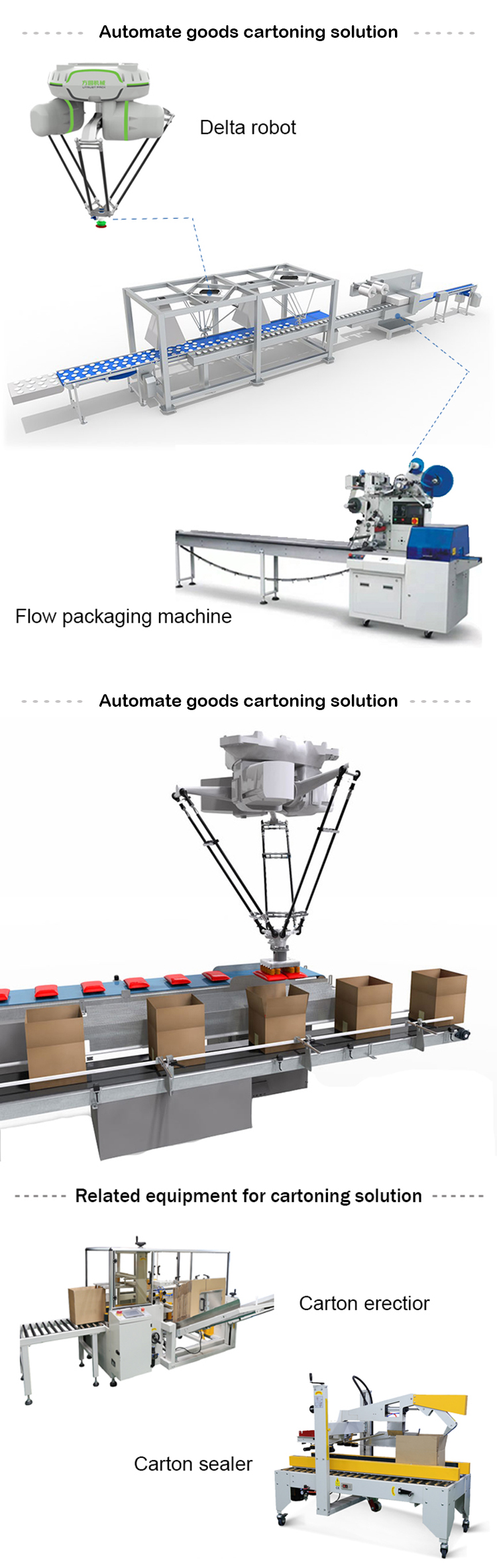
اختيار الروبوت ووضع / التحكم المؤازر Delta Arm لتخصيص الحل
الحد الأقصى لارتفاع البيك اب: أقصى مسافة تنازلية من مركز الموضع الأصلي رأسيًا
إلى أسفل أثناء عملية الاستلام.اختيار الروبوت ووضع / التحكم المؤازر Delta Arm لتخصيص الحل
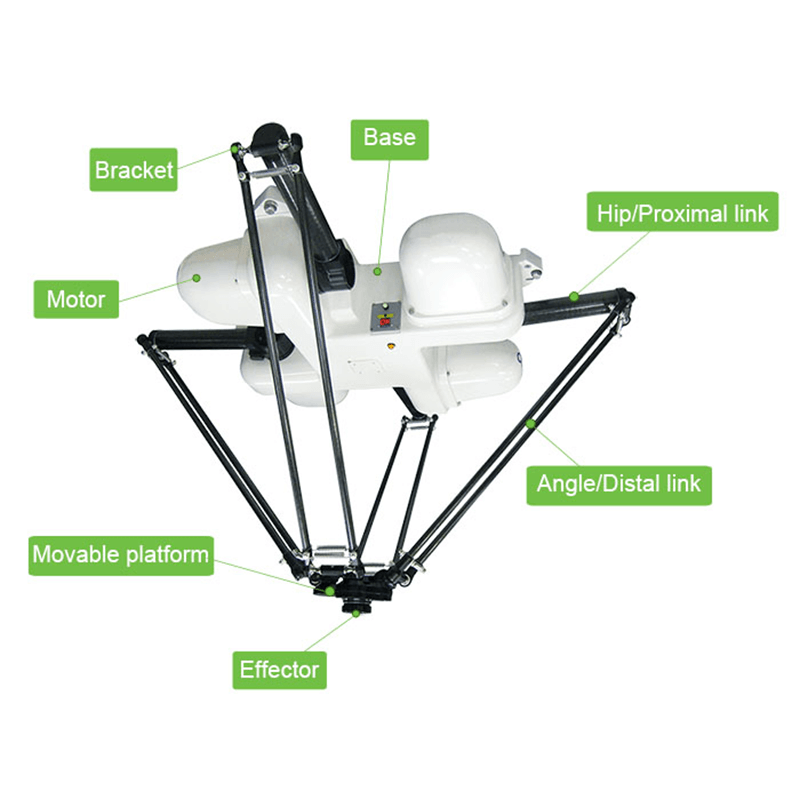
تفاصيل--4 محاور اختيار مكان الذراع الروبوتية دلتا


المعلمة الفنية - ذراع دلتا للتحكم المؤازر لحل التخصيص
Moديل UT-400 UT-800 محور 4 4 قطر الحركة (مم) 400 800 إرتفاع الالتقاط الأقصى (مم) 120 410 الحمولة (كجم) 0.5 3 الحمولة القصوى (كلغ) 3 5 التكرار (مم) ± 0.1 ± 0.1 دقة تحديد الزاوية (°) ± 0.1 ± 0.1 يدق مرات / دقيقة 160 280 فئة IP IP54 IP54 تثبيت طاولةقمة تصاعد النفقات العامة امدادات الطاقة (ت) تيار متردد 380/220 تيار متردد 380/220 الوزن (كجم) 16 64 الأبعاد (مم) 605 * 605 * 482 1000 * 1000 * 718
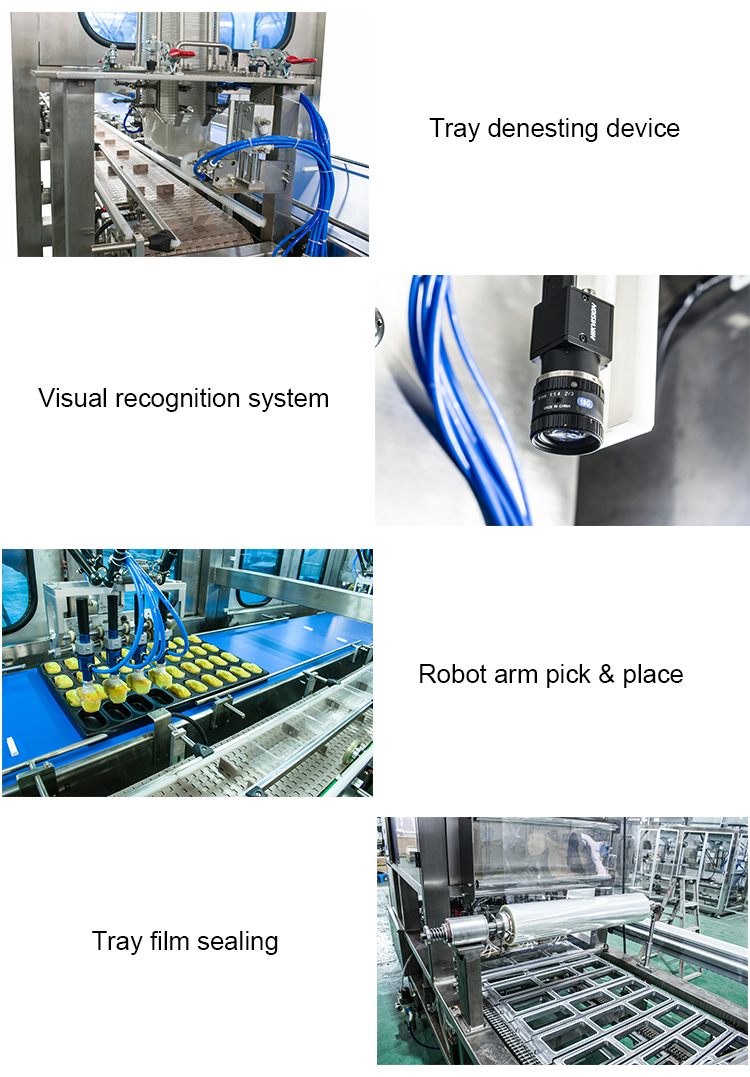
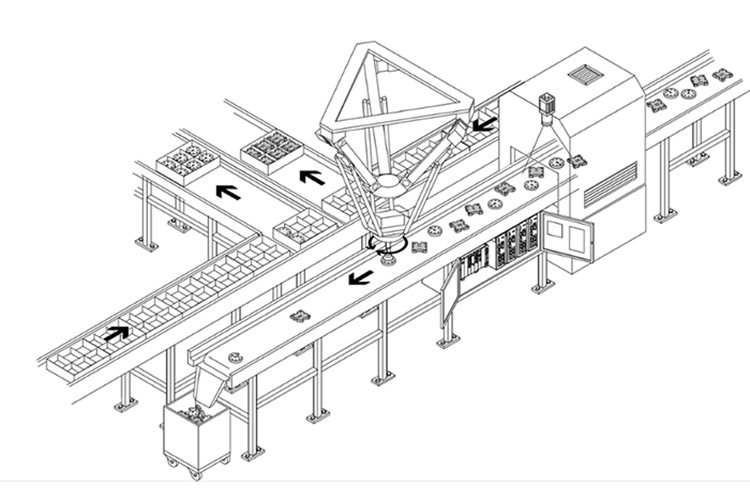
تخصيص--دلتا روبot Arm لفرز البضائع
1 / مادة قوية: مصنوعة بشكل أساسي من ألياف الكربون وتكوين سبائك الألومنيوم.
2 / الدقة العالية: تحديد الهدف وتتبع الحركة واختيار ووضع الهدف في الموضع المحدد.
3 / الحمولة القصوى: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، فسيتأثر مؤشر أداء الروبوت ، وستكون مشكلة تآكل المحرك ، وأجزاء التآكل ، والذراع المدفوع ، والعمود المتوسط أكثر خطورة

طلب
 اتصل بنا
اتصل بنا


أكياس صلصة الطماطم دلتا روبوت الفرز ينطبق على انتقاء أو وضع الكيس ، البسكويت ، الحلوى ، علب الصفيح ، الزجاجة ، الملحقات ، إلخ.توفر وحدة المعالجة عالية السرعة المزودة بوظيفة الروبوت لحركة حرة بأبعاد ثلاثية الدقة في الحركة وتحديد الموضع. أجل الحد الأدنى: 1ميناء الشحن: قوانغتشوالمنطقة الأصلية: الصينالمهلة الزمنية: 30 يوما بعد تلقي الودائع
اقرأ أكثر
1.الحد الأقصى لارتفاع الالتقاط: أقصى مسافة تنازلية من مركز موضع الأصل الرأسي إلى أسفل أثناء عملية الالتقاط2- الحمل المقدر: الحمولة القصوى للروبوت في ظل أفضل أداء وتشغيل عادي للروبوت3. الحد الأقصى للحمل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورة أجل الحد الأدنى: 1الدفع: T / Tميناء الشحن: قوانغتشوالمنطقة الأصلية: الصينالمهلة الزمنية: 20-30days
اقرأ أكثر
الحد الأقصى لارتفاع البيك اب: أقصى مسافة تنازلية من مركز الموضع الأصلي رأسيًا إلى أسفل أثناء عملية الاستلام.معدل الحمولة: أقصى حمل للروبوت في ظل أفضل أداء وتشغيل عادي للروبوتماكس تحميل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورةالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:22 يوما بعد تلقي الودائع
اقرأ أكثر
الحد الأقصى لارتفاع البيك اب: أقصى مسافة تنازلية من مركز الموضع الأصلي رأسيًا إلى أسفل أثناء عملية الاستلام.معدل الحمولة: أقصى حمل للروبوت في ظل أفضل أداء وتشغيل عادي للروبوتماكس تحميل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورةأجل الحد الأدنى: 1الدفع: TTميناء الشحن: قوانغتشوالمنطقة الأصلية: قوانغتشو الصينالمهلة الزمنية: 22 يوما بعد تلقي الودائع
اقرأ أكثر
4Axis Delta Robot للقطف والوضع قابل للتطبيق في التقاط أو وضع البسكويت والحلوى وعلب الصفيح والزجاجة والملحقات وما إلى ذلك.رقم الصنف: UT-400أجل الحد الأدنى: 1الدفع: T / Tميناء الشحن: قوانغتشوالمنطقة الأصلية: الصينالمهلة الزمنية: 60 يومًا
اقرأ أكثر
1.maximum ارتفاع الالتقاط: أقصى مسافة تنازلي من مركز موضع الأصل العموديإلى أسفل أثناء عملية التقاط。2. الحمل المصنوع: الحد الأقصى الحمل للروبوت تحت أفضل أداء وتشغيل عادي للروبوت3. تحميل الحمل: الحد الأقصى للحمل للروبوت الذي يتجاوز الحمل المقنن. إذا تجاوز الحمل المقنن ،سيتأثر مؤشر أداء الروبوت ، ومشكلة التآكل للمحرك ، وارتداء الأجزاء ، والذراع المدفوعة ،سيكون العمود المتوسط أكثر جدية MIN الترتيب: 1الدفع: T/T.الشحن: قوانغتشوالمنطقة الأصلية: الصينالمهلة: 15 يومًا بعد استلام الودائع
اقرأ أكثر
حفظ ملفات تعريف الارتباط بتكلفة العمالة اختر مكان روبوت / 3 محاور انتقاء ووضع روبوت الحد الأقصى لارتفاع البيك اب: أقصى مسافة تنازلية من مركز الموضع الأصلي رأسيًا إلى أسفل أثناء عملية الاستلام.معدل الحمولة: أقصى حمل للروبوت في ظل أفضل أداء وتشغيل عادي للروبوتماكس تحميل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورةالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:22 يوما بعد تلقي الودائع
اقرأ أكثر
انتقاء ووضع ذراع روبوت ذراع روبوت صناعي صغير لصناعة الأدوية الحد الأقصى لارتفاع البيك اب: أقصى مسافة تنازلية من مركز الموضع الأصلي رأسيًا إلى أسفل أثناء عملية الاستلام.معدل الحمولة: أقصى حمل للروبوت في ظل أفضل أداء وتشغيل عادي للروبوتماكس تحميل: الحمولة القصوى للروبوت التي تتجاوز الحمولة المقدرة. إذا تجاوز الحمل المقدر ، سوف يتأثر مؤشر أداء الروبوت ، مشكلة تآكل المحرك ، أجزاء التآكل ، الذراع المدفوعة ، سيكون العمود المتوسط أكثر خطورةالحد الأدنى للطلب:1قسط:TTميناء الشحن:قوانغتشوالمنطقة الأصلية:قوانغتشو، الصينمهلة:22 يوما بعد تلقي الودائع
اقرأ أكثر











 شبكة IPv6 مدعومة
شبكة IPv6 مدعومة
